DJI无人机 Payload SDK 介绍
Back to Top为了覆盖更广泛的受众,这篇文章已从日语翻译而来。
您可以在这里找到原始版本。
前言
#is 正在进行光伏发电板清洁机器人系统的开发。
该系统由清洁光伏发电板的机器人和用于运输机器人的无人机构成,本文将介绍无人机端的开发技术 Payload SDK。
项目概述
#为了最大限度地保持光伏发电板的发电效率,必须定期清除表面沉积的灰尘和污垢。对于一般家庭用的小型光伏板,可以手工清洁。但在兆瓦级光伏发电场等大型发电设施中,依靠人力清洁在效率和成本方面都不现实。

我们公司正在开发面向此类发电设施的自主清洁机器人。
清洁机器人系统构成
#在电站中,连接在一起的光伏发电板被分别安装在不同位置。光伏发电板安装在距离地面 2 米以上的高处,人工在板间搬运机器人非常困难。
因此,本系统采用使用无人机来运输机器人的方法。

主要构成要素如下:
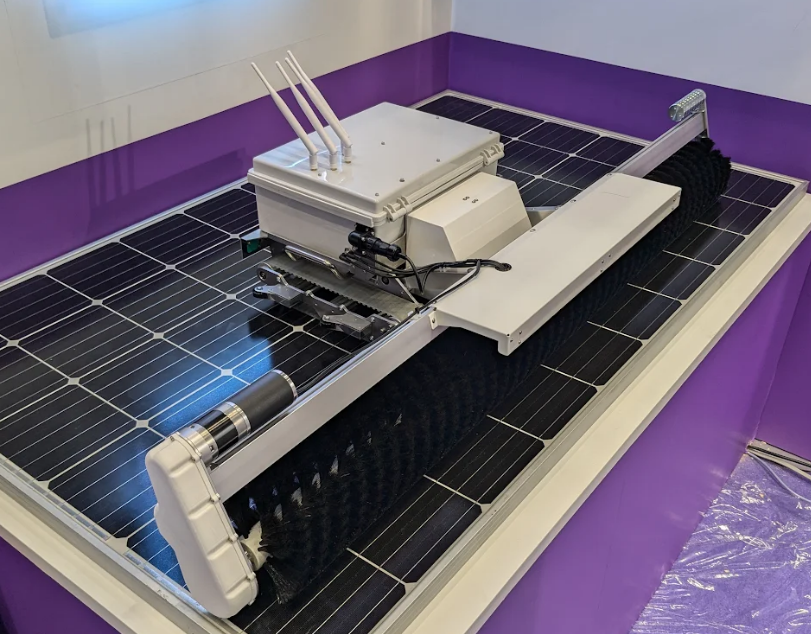
清洁机器人
#这是我们自主开发的 AMR,可在光伏发电板表面通过刷子清洁的同时自主巡航。它是无人机的运输对象(载荷),并且被设计为总重量在无人机可载范围内。也在 2025 国际机器人展 中进行了展示。
无人机
#本系统使用 DJI FlyCart 30。其可搬重量为双电池模式下 30 kg(最大飞行时间 18 分钟)、单电池模式下 40 kg(最大飞行时间 9 分钟)。
遥控器(操作端)为 DJI RC Plus,其上运行名为 DJI Pilot 2 的应用。

载荷设备
#由于 FlyCart 30 标配的以下货物箱内部尺寸为 573×416×305 mm,无法容纳机器人。因此,我们开发了用于将机器人固定在无人机上的设备。

载荷设备构成
#在本系统中,载荷设备的主要作用是将机器人固定在无人机上。
通过遥控器的操作控制锁定机构以固定机器人。锁定机构的控制以及向遥控器提供控件(Widget)由载荷设备内的 SBC(单板计算机)负责。
DJI 为载荷设备的开发提供了名为 Payload SDK 的 SDK,在载荷设备上使用该 SDK 开发的应用将在 SBC 上运行。
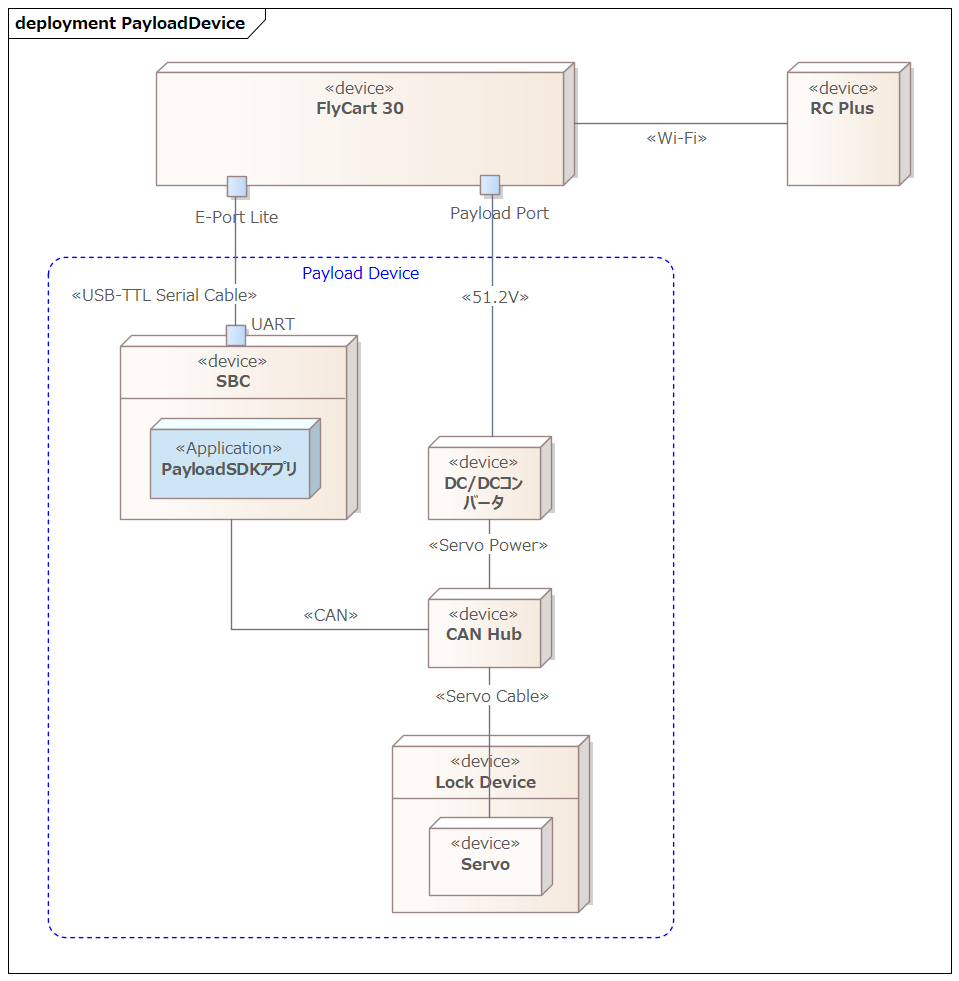
在 FlyCart 30 上,以下接口可用于载荷设备:
- E-Port Lite
- USB Type-C 的维护端口
- 可直接通过 USB Type-C 数据线与安装了 DJI Assistant 2 的 PC 连接,进行机体固件更新和日志收集
- 对于如 FlyCart 30 这样未提供 E-Port 的机型,可通过 USB to TTL 串口模块将 E-Port Lite 与 SBC 连接,并作为扩展端口使用
- Payload Port
- 载荷设备专用电源端口
- 额定电压为 51.2 V
由于本系统的锁定机构仍在开发中,这里略去详细信息。下面是使用支持 CAN 的伺服电机时的构成示意图。在此情况下,伺服电机的供电由 Payload Port 提供,SBC 通过 E-Port Lite 与机体通信以控制伺服电机。
机体提供的各种扩展端口
#上述构成以 FlyCart 30 为例。不同机体可能提供除 E-Port Lite 之外的其他扩展端口。
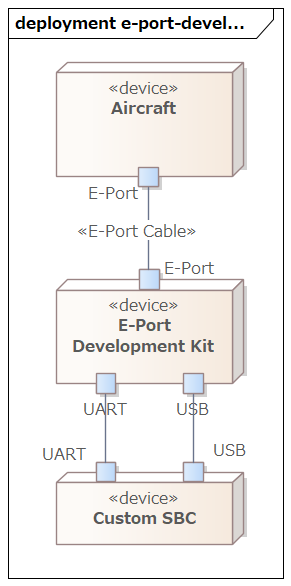
这是许多机体支持的扩展端口,提供电源、UART、USB。可通过中继 E-Port Development Kit 与定制载荷连接,实现 UART 和 USB 通信。
在 E-Port Lite 上获取相机图像等功能受限,而通过 E-Port 中继 Development Kit,可扩展 USB,从而使用更多功能。
这是在 M400(Matrice 400)上提供的扩展端口(M400 于 2025 年 6 月发布,E-Port V2 为相对较新的端口)。与多数机体仅提供一个 E-Port 不同,E-Port V2 在 M400 机体下方提供 4 个端口,每个端口可供电 120 W。电源输出可在 13.6 V、17 V、24 V 三档间切换。支持 USB 3.0,可同时获取 4K 视频流及雷达点云数据等。可通过中继 E-Port V2 Development Kit 将其连接到定制载荷。
这是装备在 M300 RTK(2020 年 5 月发布)和 M350 RTK(2023 年 5 月发布)云台部的标准接口,也称为 PSDK Port。用于连接 DJI 自家 Zenmuse 系列云台载荷(相机、传感器等)的接口。

DJI 为第三方提供了 Payload SDK Development Board Kit 2.0,可通过该开发板中继与定制载荷连接。
这是现有机体中仅由 M300 RTK 提供的旧接口。它是 E-Port 出现以前的方式,使用 Onboard SDK (OSDK),但 OSDK 的最终版本为 2021-02-02(OSDK 4.1.0),不再添加新功能。
OSDK Port 除可与 OSDK Expansion Module 连接外,还支持与 E-Port Development Kit 连接,并可使用 Payload SDK(PSDK)。根据 OSDK Version Support Information(2023 年 5 月 9 日),OSDK 4.x 的功能均已迁移至 PSDK V3,新项目开发推荐迁移到 PSDK V3。
不同机体的扩展端口
#以下列出了现有机体提供的扩展端口一览,摘自 Standard Hardware Port Introduction。
| Aircraft | Port Name | Supports App Binding |
|---|---|---|
| FlyCart 100 | E-Port Lite | – |
| FlyCart 30 | E-Port Lite | – |
| Matrice 4D/4TD | E-Port, E-Port Lite | ✓ |
| Matrice 4E/4T | E-Port, E-Port Lite | ✓ |
| Matrice 3D/3TD | E-Port, E-Port Lite | – |
| Matrice 30/30T | E-Port | – |
| Mavic 3E/3T | E-Port | – |
| M400 | E-Port V2 | ✓ |
| M350 RTK | E-Port | – |
| M350 RTK | Gimbal Port | ✓ |
| M300 RTK | OSDK Port | – |
| M300 RTK | Gimbal Port | ✓ |
在 Supports App Binding 列被勾选的机体,需要执行 Application Binding 步骤。此步骤将在另一篇文章中介绍。
各端口类型的功能对应表
#下表从 Aircraft Type Function Difference 列表中,摘录了部分机体按端口划分的功能支持情况。
即使是相同的端口类型,不同机体支持的功能也可能不同,因此无法仅凭端口类型判断“使用 E-Port 即可实现该功能”之类的结论。例如 Hoisting Control 仅在 FlyCart 100 的 E-Port Lite 上得到支持。
| Function Name | Function Level | FlyCart 30 E-Port Lite | Matrice 4E/4T E-Port | Matrice 400 E-Port V2 | Matrice 350 RTK Gimbal Port |
|---|---|---|---|---|---|
| Log Management | basic | ✓ | ✓ | ✓ | ✓ |
| Data Subscription | basic | ✓ | ✓ | ✓ | ✓ |
| Basic Camera Function | basic | - | ✓ | ✓ | ✓ |
| Basic Camera Management | advanced | - | - | ✓ | - |
| Gimbal Function | basic | - | ✓ | ✓ | ✓ |
| Gimbal Management | advanced | - | - | ✓ | - |
| Power Management | basic | ✓ | - | ✓ | ✓ |
| Flight Control | advanced | ✓ | - | ✓ | ✓ |
| Custom Widget | basic | ✓ | ✓ | ✓ | ✓ |
| Custom HMS | basic | ✓ | ✓ | ✓ | ✓ |
| HMS Manager | advanced | ✓ | - | ✓ | ✓ |
| Time Synchronization | basic | - | ✓ | ✓ | ✓ |
| Low-speed Data Transmission | basic | ✓ | ✓ | ✓ | ✓ |
| Camera Video Stream | basic | - | ✓ | ✓ | ✓ |
| Playback Download | basic | - | - | ✓ | ✓ |
| X-Port Function | basic | - | - | ✓ | ✓ |
| Camera Stream Liveview | advanced | - | - | ✓ | - |
| Local Upgrade | basic | - | ✓ | - | ✓ |
| High-speed Data Transmission | basic | - | - | ✓ | - |
| Positioning | basic | - | - | ✓ | ✓ |
| SDK Interconnection | basic | - | - | ✓ | ✓ |
| Waypoint Mission | advanced | ✓ | - | ✓ | - |
| Speaker | basic | ✓ | ✓ | ✓ | ✓ |
| Hoisting Control | basic | - | - | - | - |
| Access Internet | advanced | - | - | ✓ | - |
| Network RTK | advanced | - | - | ✓ | - |
串口通信规范
#Payload SDK 使用 UART 和 USB 串行通信。
在 USB 通信中,使用 USB Gadget(使 Linux 设备模拟为 USB 设备端的一种机制),并区分使用以下两种通信方式。
- Bulk(USB Bulk Transfer)
- 设备与主机之间的双向原始数据通信
- RNDIS(Remote Network Driver Interface Spec)
- 在 USB 上模拟以太网协议
- 设备与主机之间的 IP 通信
各端口的支持情况如下表所示。
| Port | Only UART | UART+Bulk | UART+RNDIS | Only Bulk | Only RNDIS |
|---|---|---|---|---|---|
| E-Port Lite | ✓ | – | – | – | – |
| E-Port | ✓ | ✓ | ✓ | – | – |
| E-Port V2 | ✓ | – | – | ✓ | ✓ |
| Gimbal Port | ✓ | – | ✓ | – | – |
| 方式 | 说明 |
|---|---|
| Only UART | 仅通过 UART 与无人机通信 |
| UART+Bulk | 同时使用 UART 和 Bulk 与无人机通信 |
| UART+RNDIS | 同时使用 UART 和 RNDIS 与无人机通信 |
| Only Bulk | 仅通过 Bulk 与无人机通信 |
| Only RNDIS | 仅通过 RNDIS 与无人机通信 |
仅 E-Port V2 支持仅通过 Bulk 或仅通过 RNDIS 通信,其余端口均需要 UART。
详细信息请参阅以下 DJI Developer Support 页面(中文)。访问均需在 DJI Developer Center 注册账户。
由于任何端口都可仅通过 UART 进行通信,建议在开发初期仅连接 UART,以验证使用 Payload SDK 开发的应用运行情况。
Payload SDK 的 API 规范
#Payload SDK 的 API 参考 中,列出了从 SDK 源代码头文件自动生成的 API 规范。然而说明文很少,以函数和类型列表为主。因此,要理解 API 规范,需要参考示例代码并在实机上验证其运行。
Payload SDK 示例应用
#在 DJI 的 Payload-SDK 仓库中,公开了 Payload SDK 的库及基于其的示例应用。
目录结构
#仓库的目录结构如下。
├── psdk_lib
│ ├── include
│ └── lib
│ ├── aarch64-linux-gnu-gcc
│ ├── arm-linux-gnueabi-gcc
│ ├── arm-linux-gnueabihf-gcc
│ ├── armcc_cortex-m4
│ └── x86_64-linux-gnu-gcc
├── samples
│ ├── sample_c
│ │ ├── module_sample
│ │ │ ├── camera_emu
│ │ │ ├── camera_manager
│ │ │ ├── cloud_api
│ │ │ ├── data_transmission
│ │ │ ├── fc_subscription
│ │ │ ├── flight_control
│ │ │ ├── gimbal_emu
│ │ │ ├── gimbal_manager
│ │ │ ├── hms
│ │ │ ├── interest_point
│ │ │ ├── liveview
│ │ │ ├── mop_channel
│ │ │ ├── payload_collaboration
│ │ │ ├── perception
│ │ │ ├── positioning
│ │ │ ├── power_management
│ │ │ ├── tethered_battery
│ │ │ ├── time_sync
│ │ │ ├── upgrade
│ │ │ ├── utils
│ │ │ ├── waypoint_v2
│ │ │ ├── waypoint_v3
│ │ │ ├── widget
│ │ │ ├── widget_interaction_test
│ │ │ └── xport
│ │ └── platform
│ │ ├── linux
│ │ │ ├── common
│ │ │ │ ├── 3rdparty
│ │ │ │ ├── monitor
│ │ │ │ ├── osal
│ │ │ │ └── upgrade_platform_opt
│ │ │ ├── manifold2
│ │ │ │ ├── application
│ │ │ │ └── hal
│ │ │ ├── manifold3
│ │ │ │ ├── app_json
│ │ │ │ ├── application
│ │ │ │ └── hal
│ │ │ ├── nvidia_jetson
│ │ │ │ ├── application
│ │ │ │ └── hal
│ │ │ └── raspberry_pi
│ │ │ ├── application
│ │ │ └── hal
│ │ └── rtos_freertos
│ │ ├── common
│ │ │ └── osal
│ │ ├── gd32f527_development_board
│ │ │ ├── application
│ │ │ ├── bootloader
│ │ │ ├── drivers
│ │ │ ├── hal
│ │ │ ├── middlewares
│ │ │ └── project
│ │ └── stm32f4_discovery
│ │ ├── application
│ │ ├── bootloader
│ │ ├── drivers
│ │ ├── hal
│ │ ├── middlewares
│ │ └── project
│ └── sample_c++
│ ├── module_sample
│ │ ├── camera_manager
│ │ ├── flight_controller
│ │ ├── gimbal
│ │ ├── hms_manager
│ │ ├── liveview
│ │ ├── perception
│ │ ├── positioning
│ │ └── widget_manager
│ └── platform
│ └── linux
│ ├── common
│ │ ├── 3rdparty
│ │ └── osal
│ ├── manifold2
│ │ ├── application
│ │ └── hal
│ ├── manifold3
│ │ ├── application
│ │ └── hal
│ ├── nvidia_jetson
│ │ ├── application
│ │ └── hal
│ └── raspberry_pi
│ ├── application
│ └── hal
psdk_lib
#各平台对应的静态库位于此处。有关各工具链,请参阅 Using third-party development platforms。对于 Raspberry Pi 和 Jetson,请使用此目录下的 aarch64-linux-gnu-gcc/libpayloadsdk.a。如需使用此处未提供的工具链,可联系 SDK 技术支持(dev@dji.com),他们似乎会提供相应工具链的静态库。还可参阅 PSDK platform static library link。
samples
#module_sample
该目录包含 SDK 提供的各功能示例代码。按功能提供了相机管理、飞行控制、云台、实时取景、HMS、定位、控件等示例。
platform
该目录汇总了平台相关的代码。放置在 hal/ 下的源代码实现了硬件抽象层(HAL)(网络、UART、USB Bulk、I2C 等)。
示例应用的入口点为 application/main.cpp。它会调用 application/application.cpp,在此注册 HAL 处理程序并通过 DjiCore_Init 完成 SDK 的初始化。使用 UART、Bulk 还是 RNDIS,由注册的 HAL 处理程序组合决定。
下面是上述 HAL 处理程序注册部分(基于 CONFIG_HARDWARE_CONNECTION 的分支)的摘录。
Payload-SDK/samples/sample_c++/platform/linux/raspberry_pi/application/application.cpp
returnCode = DjiPlatform_RegHalI2cHandler(&i2CHandler);
if (returnCode != DJI_ERROR_SYSTEM_MODULE_CODE_SUCCESS) {
throw std::runtime_error("register hal i2c handler error");
}
#if (CONFIG_HARDWARE_CONNECTION == DJI_USE_UART_AND_USB_BULK_DEVICE)
returnCode = DjiPlatform_RegHalUartHandler(&uartHandler);
if (returnCode != DJI_ERROR_SYSTEM_MODULE_CODE_SUCCESS) {
throw std::runtime_error("Register hal uart handler error.");
}
returnCode = DjiPlatform_RegHalUsbBulkHandler(&usbBulkHandler);
if (returnCode != DJI_ERROR_SYSTEM_MODULE_CODE_SUCCESS) {
throw std::runtime_error("Register hal usb bulk handler error.");
}
#elif (CONFIG_HARDWARE_CONNECTION == DJI_USE_UART_AND_NETWORK_DEVICE)
returnCode = DjiPlatform_RegHalUartHandler(&uartHandler);
if (returnCode != DJI_ERROR_SYSTEM_MODULE_CODE_SUCCESS) {
throw std::runtime_error("Register hal uart handler error.");
}
returnCode = DjiPlatform_RegHalNetworkHandler(&networkHandler);
if (returnCode != DJI_ERROR_SYSTEM_MODULE_CODE_SUCCESS) {
throw std::runtime_error("Register hal network handler error");
}
#elif (CONFIG_HARDWARE_CONNECTION == DJI_USE_ONLY_USB_BULK_DEVICE)
returnCode = DjiPlatform_RegHalUsbBulkHandler(&usbBulkHandler);
if (returnCode != DJI_ERROR_SYSTEM_MODULE_CODE_SUCCESS) {
throw std::runtime_error("Register hal usb bulk handler error.");
}
#elif (CONFIG_HARDWARE_CONNECTION == DJI_USE_ONLY_NETWORK_DEVICE)
returnCode = DjiPlatform_RegHalNetworkHandler(&networkHandler);
if (returnCode != DJI_ERROR_SYSTEM_MODULE_CODE_SUCCESS) {
throw std::runtime_error("Register hal network handler error");
}
//Attention: if you want to use camera stream view function, please uncomment it.
returnCode = DjiPlatform_RegSocketHandler(&socketHandler);
if (returnCode != DJI_ERROR_SYSTEM_MODULE_CODE_SUCCESS) {
throw std::runtime_error("register osal socket handler error");
}
#elif (CONFIG_HARDWARE_CONNECTION == DJI_USE_ONLY_UART)
/*!< Attention: Only use uart hardware connection.
*/
returnCode = DjiPlatform_RegHalUartHandler(&uartHandler);
if (returnCode != DJI_ERROR_SYSTEM_MODULE_CODE_SUCCESS) {
throw std::runtime_error("Register hal uart handler error.");
}
#endif
以下是应用层次结构的示意图。
flowchart LR
subgraph App["入口点"]
A["application.cpp<br/>注册 HAL · DjiCore_Init"]
end
subgraph SDK["SDK 核心"]
B["DjiCore_Init 等"]
end
subgraph HAL["HAL 处理程序"]
H["Network / UART /<br/>USB Bulk / I2C"]
end
A --> B --> H在运行时,当 DjiCore 需要向 UART 写入数据等操作时,会回调事先注册的 HAL 处理程序。流程如下:
sequenceDiagram participant App as application.cpp participant Core as DjiCore participant HAL as HAL 处理程序 App->>Core: 注册 HAL 处理程序 App->>Core: DjiCore_Init() Note over Core: 初始化完成 Note over Core,HAL: 运行时(需要向 UART 写入时) Core->>HAL: 回调调用<br/>(例: HalUart_WriteData) HAL-->>Core: 结果
图中所示的 application.cpp 和 HAL 处理程序包含在示例代码中,DjiCore 以 psdk_lib 中的静态库形式提供。
初次查看可能会觉得示例代码量较大,但平台相关的代码基本可直接使用。不过,同一平台在最新操作系统或相关库环境下可能无法运行,因此需要开发者维护。
Payload SDK 的验证环境
#遗憾的是,要验证 Payload SDK 应用的运行,需要实际的机体。
DJI Assistant 2 虽具有飞行模拟功能,但只能在与遥控器配对的机体连接状态下使用。此外,Payload SDK 的通信目标也需要实机。
需要采购或租赁与正式运行时使用机体相同端口(E-Port Lite 或 E-Port)的机型。
本公司在正式运行中使用 FlyCart 30,但由于成本较高,开发和调试时使用配备 E-Port Lite 的其他机型(如 Matrice 4E)进行应用开发。
总结
#本文介绍了在光伏发电板清洁机器人通过无人机运输系统中,使用于无人机端开发的 Payload SDK。
在互联网上搜索,针对 Payload SDK 的资料主要限于 DJI 官方提供,实际操作步骤也以 DJI Developer Support 的中文页面为主。我们公司将应用运行起来也花费了不少功夫。希望对同样致力于定制载荷开发的同行,本文能成为起点的帮助。
有关飞行状态获取、控件集成、Application Binding 步骤等 Payload SDK 的实用主题,计划在后续文章中详细介绍。敬请继续关注。